


Robótica Cirugía Ginecológica
WHEC Boletín de la práctica clínica y directrices de gestión de los proveedores de atención médica.
Educación subvención concedida por el Women's Health and Education Center (WHEC).
Las técnicas quirúrgicas mínimamente invasivas para la realización de histerectomías y otras cirugías ginecológicas se han demostrado para reducir la morbilidad de los pacientes y disminuir la estancia hospitalaria. La laparoscopia se ha convertido en pionera en la búsqueda de la mejora de los resultados quirúrgicos mediante la reducción del dolor postoperatorio y disminuir el tiempo de recuperación. Sin embargo, el uso de instrumentos laparoscópicos pueden ser engorrosos y difíciles de manejar, lo que aumenta el tiempo operatorio y la reducción de destreza, que puede limitar la capacidad del cirujano para realizar el procedimiento con las mismas técnicas que se pueden realizar a través de una incisión abdominal tradicional. Introducido en 1999, el sistema quirúrgico Da Vinci, los urólogos aún se consideran el número del sistema de un usuario, pero las aplicaciones de robótica en la cirugía ginecológica se han expandido. En 2005, EE.UU. Food and Drug Administration la aprobación se obtuvo para el uso del robot da Vinci (Intuitive Surgical, Inc., Sunnyvale, CA) para su uso en cirugía ginecológica como una modificación del abordaje laparoscópico. Este robot emplea el uso de los brazos robóticos que el control de los instrumentos laparoscópicos vez que tiene siete grados de libertad, lo que el cirujano mejoró significativamente la destreza. El advenimiento de esta tecnología ha hecho posible la realización de los procedimientos tradicionales ginecológicos a través de una técnica laparoscópica que permite la facilidad de maniobra, por lo que combina los beneficios de un procedimiento quirúrgico mínimamente invasivo, con un período de recuperación más corto. El uso de la robótica en la cirugía ginecológica es cada vez mayor en los Estados Unidos. Una década más tarde, un número creciente de instituciones de salud están comprando el sistema robótico. En ginecología la expansión se refleja en los informes de la literatura sobre las aplicaciones robóticas en ginecología general, Uroginecología / cirugía pélvica reconstructiva, oncología ginecológica, y endocrinología reproductiva.
El propósito de este documento es examinar la reciente aprobación, la experiencia, y las aplicaciones de robots para asistir la laparoscopia en la cirugía ginecológica. Es probable que se siga desarrollando como cirujanos ginecológicos más capacitados y más pacientes buscan opciones quirúrgicas mínimamente invasivas. Bien diseñados, con estudios prospectivos bien definida clínica, los resultados a largo plazo, incluidas las complicaciones, el costo, el dolor, el retorno a la actividad normal, y la calidad de vida, son necesarios para evaluar plenamente el valor de esta nueva tecnología. La innovación quirúrgica es necesaria. Hay problemas éticos y sociales que siguen no se entienden sobre el uso de la cirugía robótica.
Historia y desarrollo de cirugía asistida por robot:
El uso de robots en la cirugía sólo ha ocurrido en los últimos 25 años. La primera aplicación de una cirugía robot fue en neurocirugía. Las limitaciones encontradas con la laparoscopia convencional incluyen la lucha contra el movimientos de la mano intuitivos, dos de visualización tridimensional, y los grados de movimiento limitado por instrumentos dentro del cuerpo, así como dificultades ergonómicas y amplificación temblor (1). En un intento de superar estos obstáculos, la robótica ha sido recientemente incorporado en el arsenal ginecológico. El modelo original, conocido como el Puma 560 (Stäubli Corporation, Duncan, SC), fue utilizado para las maniobras de neurocirugía estereotáxica en la tomografía computarizada (TC) de orientación. Pronto, la cirugía ortopédica estaba usando un dispositivo llamado Robodoc (Curexo Technology Corporation, Sacramento, CA) para auxiliar en los reemplazos totales de cadera y urología se realiza resección transuretral de la próstata con un robot a través de la orientación de tres construidos antes de la intervención imagen tridimensional. Común entre estos robots de éxito fue el hecho de que fueron desarrollados para funcionar de manera autónoma con un plan de pre o en un papel de supervisión. Este papel pasivo se convierta en uno más activo, con un entorno de inmersión que se conoce como tecnología de la telepresencia robótica. El concepto de tecnología de la telepresencia robótica nació gracias a la colaboración del Instituto de Investigación de Stanford, el Departamento de Defensa y la Administración Nacional de Aeronáutica y del Espacio (NASA) (2). La investigación fue dirigida a permitir a los cirujanos militares para realizar la cirugía en los soldados heridos en un lugar seguro y remoto. Como la tecnología más desarrollada, la investigación no se centró en telecirugía, sino en el uso de la cirugía robótica para mejorar aún más la cirugía laparoscópica y mínimamente invasiva en las salas de operaciones civiles. La ergonomía Estos avances fueron posibles debido a los sistemas de mejora de la visión, con la articulación de los instrumentos de extremos distales, y mejorar (1) (2).
Aunque la tecnología de la telepresencia robótica fue creado inicialmente para la cirugía cardíaca, pronto se aplicó a los campos de la urología y ginecología. Hoy en día sólo hay un EE.UU. Food and Drug Administration aprobó dispositivo para la robótica quirúrgica. Esta plataforma robótica actual es conocido como el sistema quirúrgico da Vinci (Intuitive Surgical, Sunnyvale, CA). Los avances tecnológicos claves que aparecen con las anteriores predecesores, no sólo se incorporan en la plataforma de hoy, pero son más refinados. En 2000, la Food and Drug Administration de EE.UU. aprobó el uso de un sistema robótico para la laparoscopia, y específicamente para la histerectomía en 2005. La cirugía robótica permite al cirujano a sentarse en una consola, mientras que tres o cuatro brazos robóticos se mueven sobre el paciente de acuerdo a las órdenes del cirujano. Comúnmente realizados asistida por robot en cirugías laparoscópicas ginecológica benigna son la histerectomía, la miomectomía, reanastomosis tubárica, histerectomía radical, la disección de los ganglios linfáticos, y sacrocolpopexies.
Indicaciones y contraindicaciones de la cirugía asistida por robot:
Cirugía asistida por robot tiene indicaciones similares a la cirugía laparoscópica convencional. Sin embargo, como la tecnología robótica permite a los cirujanos con mayor facilidad y simplemente realizar complejas maniobras laparoscópicas, la disponibilidad del robot permite al cirujano realizar procedimientos más sofisticados que la vía laparoscópica convencional, por lo tanto reduciendo el número de procedimientos abiertos. Por ejemplo, un cirujano ginecológico normalmente podrían preferir un procedimiento abierto en la vía laparoscópica convencional para la endometriosis pélvica avanzada. Sin embargo, con la disponibilidad del sistema robótico, lo que facilita la disección y sutura de tejidos, el cirujano puede optar por el enfoque de robótica, resultando en una menor morbilidad, hospitalización más corta, menos dolor postoperatorio, retorno temprano al trabajo, y mejores resultados cosméticos en comparación con una operación abierta. Contraindicaciones, también, suelen ser similares a los de la laparoscopia convencional (por ejemplo, inmediata necesidad de una laparotomía para controlar la hemorragia, mala visualización, o la exposición). El sistema robótico generalmente acorta el tiempo operatorio de un procedimiento endoscópico largo (por ejemplo, la histerectomía radical, linfadenectomía, sacrocolpopexia). Por otra parte, puede aumentar el tiempo total de un procedimiento breve y sencilla (por ejemplo, anexectomía, la esterilización endoscópica). Cuando se agrega en el tiempo empleado en cubrir y la creación del robot, el tiempo de conexión, y el tiempo de operación el volumen de negocios habitación, usando el sistema robótico en simples procedimientos cortos endoscópica puede no ser rentable.
Montaje Básica e instrumentos:
Un sistema básico de robótica quirúrgica se compone de tres partes: un paciente-robot lado, un carro de la visión, y el maestro de robótica de la consola. El robot cirujano opera desde el maestro de consola remota utilizando una combinación de controles de mano y los pedales. Un pedal controla el movimiento de la cámara (a la derecha / izquierda, arriba / abajo, entrada / salida) y la orientación horizontal, mientras que cerca del pedal controla el foco. Otro pedal de embrague proporciona un mecanismo que permite el reposicionamiento de los controles de cambio y proporciona los instrumentos, un rango de movimiento más allá de los límites físicos de la consola. Otro conjunto de pedales de control, tanto monopolar y bipolar de fuentes de energía. El paciente es parte del carrito de ruedas entre las piernas del paciente, y los brazos robóticos se adjuntan a la robótica trócares de acero inoxidable a través de un proceso denominado "acoplamiento". Los controles de mano o bien operar la cámara o hasta dos instrumentos robóticos a la vez. Hay hasta tres brazos robóticos del fallo, con la opción de cambiar el control entre dos de los tres brazos operativos. Si bien los instrumentos robóticos de funcionamiento operativo, el cirujano es capaz de manipular, el reposicionamiento, agarrar, retraer, corte, disección, coagulación y la sutura. El maestro de robótica de la consola también ofrece al cirujano una imagen tridimensional a través de un visor estereoscópico. Los siguientes instrumentos se utilizan para la mayoría de las cirugías ginecológicas:

Robot da Vinci ® y EndoWrist Instrumentos de uso general para cirugías ginecológicas.
A diferencia de los robots industriales, estos sistemas no son autónomos, y de ser taxonómicamente correcta, no deberían ser llamados máquinas. Un robot quirúrgico es en realidad una colección de herramientas wristed llama manipuladores, que reciben instrucciones digitales desde un ordenador acoplado al equipo. El cirujano, sentado en una consola de vídeo de diseño ergonómico con una "inmersión" 3-D de visualización, inicia las instrucciones digitales mediante el control de asideros sofisticados - esencialmente, joysticks, con siete grados de libertad, (adición de la brea, la guiñada y la pinza -como el movimiento a los que ya estaban disponibles). Los manipuladores de dentro del cuerpo del paciente duplicar los movimientos de la mano del cirujano en la consola, y los filtros de software a cabo incluso temblores fisiológicos (3). A pesar de todos estos avances tecnológicos que hacen que el cirujano casi autónomos, un asistente de cabecera sigue siendo necesaria para todos los casos, asistida por robot. Su responsabilidad es principalmente el intercambio de instrumentos, de succión y de riego, la introducción de sutura y la recuperación, y la retracción adicional.
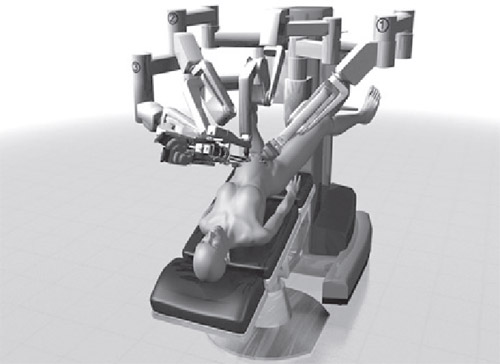
Postioning paciente; creación y el acoplamiento del robot asistida por robot para cirugías ginecológicas.
Acoplamiento del robot y selección de instrumentos:
Los dos componentes principales del sistema son el cirujano de la consola y la columna de la robótica. Después de la intubación endotraqueal, la posición del paciente en la posición de litotomía dorsal con los brazos metidos cómodamente. A 12-mm trocar umbilical, se coloca mediante la técnica abierta de Hasson. Dos de 8 mm especialmente diseñado trócares robóticos colocados bilateral de 10 cm lateral y en el nivel del ombligo. Mientras tanto, un accesorio de trocar de 10 mm se coloca entre el puerto umbilical y el puerto lateral izquierdo 3 cm por encima del ombligo. Cuando se utiliza el brazo robótico de sesiones, que se coloca trocar de 10-cm lateral y 10 cm caudal a la robótica trocar derecho. La mesa de operaciones se reduce al nivel más bajo y lo suficientemente Trendelenburg se obtiene para permitir la eliminación de los intestinos fuera de la pelvis, de hasta 30 º en pacientes obesos. La columna de robótica avanzada y se coloca entre las piernas del paciente. A continuación, el laparoscopio robótica (InSite Vision System; Intuitive Surgical) se inserta en el trócar umbilical, y los dos brazos robóticos que se adjuntan a los trocares laterales robótica. El cirujano se sienta, unscrubbed, en la consola. El asistente se sienta en el lado izquierdo del paciente con la mano derecha para ayudar al cirujano a través del puerto de accesorios (por ejemplo, la retracción, la introducción de las suturas y el riego de aspiración, recipiente sellado y extracción de la muestra) y viceversa para un zurdo asistente. Con S y secundarios Si la plataforma de conexión hace que el acceso vaginal más fácil.
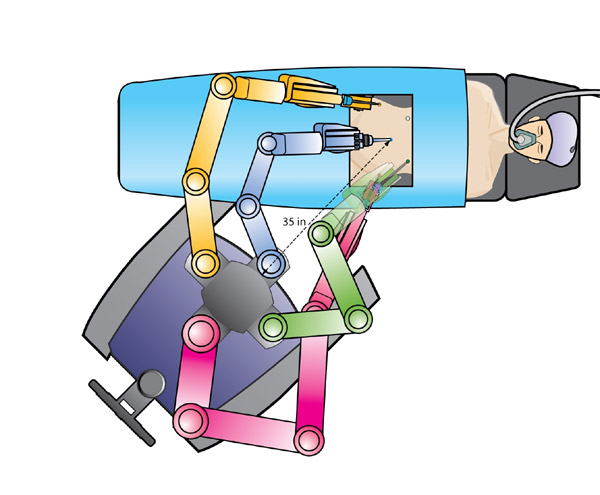
Si S y la Plataforma creada para el acoplamiento lado
Una variedad de instrumentos EndoWrist ® están disponibles para la cirugía robótica gencologic, sin embargo, el cirujano debe limitar el intercambio de intrument de un procedimiento eficaz y reducir al mínimo los costos. Para la mayoría de los pacientes la espátula monopolar o tijeras se utilizan con el brazo derecho de robótica, y PK (cinética de plasma) en el brazo izquierdo robótica. Una pinza (Prograsp) instrumento se inserta con el cuarto brazo robótico siempre que se utilice. Cuando se requiere sutura, el instrumento adecuado robótica está encendido por un porta-agujas Mega, que también es capaz de cortar hilos de sutura.
Ventajas de la Cirugía Robótica:
La cirugía robótica ofrece tres ventajas sobre la laparoscopia: un sistema de tres dimensiones la visión, la instrumentación wristed, y la posición ergonómica para el cirujano en el desempeño de los procedimientos quirúrgicos. De la cirugía laparoscópica convencional tiene una pronunciada curva de aprendizaje para los médicos porque tiene dos imágenes tridimensionales y consiste en el dominio de la lucha contra el movimientos de la mano intuitiva. La cirugía robótica, sin embargo, resuelve algunos de estos retos, ya que utiliza las imágenes tridimensionales y los instrumentos que se mueven al igual que la muñeca del cirujano. El sistema robótico elimina los temblores de mano normal y permite que el cirujano se siente, en lugar de stand, durante el procedimiento, lo que ayuda a proteger contra la fatiga. El cirujano laparoscópica ginecológica realiza procedimientos en un espacio confinado, la pelvis femenina. Instrumentación wristed permite al cirujano ginecológico para obtener el ángulo exacto instrumento disponible en la laparotomía. Esto también elimina el efecto de punto de apoyo que está presente con la laparoscopia, donde los cirujanos que mover su mano en la dirección opuesta a la ubicación prevista de la punta distal del instrumento (por ejemplo, hacia la izquierda del paciente si desea que el instrumento se trasladó a la derecha del paciente) . Con la cirugía robótica, los movimientos son naturales, y cirujano mueve las manos en la dirección que desean los instrumentos para moverse. El "wristed" instrumentación permite una mayor destreza y ofrece siete grados de libertad, similar a la mano humana (4). Tres grados son proporcionados por los brazos robóticos adjunta a los trócares de la pared abdominal (inserción, el tono de guiñada), y cuatro grados el resultado de la "wristed" instrumentos (cabeceo, guiñada, balanceo y adherencia). El tono de los términos, de balanceo y guiñada son las tres características que describen las rotaciones en tres dimensiones de todo el instrumento robótico de origen de coordenadas del sistema, el centro de masa. Pitch es la rotación alrededor del eje lateral. La guiñada es la rotación sobre el eje vertical, y el rollo es la rotación alrededor del eje longitudinal.
Menor pérdida de sangre ha sido reportada en estudios comparativos (5). La visualización mejorada le da al cirujano ginecológico una mayor capacidad para identificar los planos tisulares, los vasos sanguíneos y los nervios durante la realización del procedimiento quirúrgico. La fatiga y la incomodidad física puede convertirse en limitaciones durante cualquier procedimiento quirúrgico. Con la cirugía robótica, el cirujano se sienta cómodamente en la consola quirúrgica desde el punto de vista de pie en la cabeza del paciente y manipula los controles de mano y los pedales, mientras que en una posición ergonómica. Esto puede servir para reducir la fatiga y la incomodidad durante procedimientos quirúrgicos complejos. TilePro (Intuitive Surgical, Inc. Sunnyvale, CA) es una característica que permite la entrada de imagen y vídeo a la consola. Esto puede ser visto por el cirujano de la consola para fines de instrucción durante la fase inicial de la curva de aprendizaje o para la introducción de los datos radiológicos de la ecografía, la tomografía computarizada (TC) o resonancia magnética nuclear (RMN).
Desventajas de la Cirugía Robótica:
El robot da Vinci gastos de 1,65 millones dólares a la compra con los gastos de mantenimiento anual de esta tecnología es $ 149.000 por año. Mínimamente invasivos histerectomía (vaginal y laparoscópica) están infrautilizadas en los Estados Unidos. Por ejemplo, de las histerectomías hecho de la no-siete mejores diagnósticos de cáncer en los Estados Unidos, aproximadamente el 66,1% fueron el dolor abdominal, 21,8% se realizó por vía vaginal, y sólo el 11,8% se realizaron por vía laparoscópica (4) (6). De la cirugía robot mejorar sustancialmente los resultados de las rutas vaginal o laparoscópica convencional? Introducido en la década de 1990, la histerectomía laparoscópica-vaginal asistido (HVAL) se esperaba para reemplazar a la "ciega" la histerectomía vaginal, sin embargo, en un ensayo aleatorio, la única diferencia significativa entre estos abordajes quirúrgicos fue dos veces el coste de incluir el laparoscopio. Los estudios de seguimiento se muestran las ventajas de la HVAL relativos a la histerectomía realizada por laparotomía, sin embargo, estas cifras se han mantenido estables, mientras que la histerectomía vaginal números han disminuido, probablemente a expensas de HVAL. Considerando estos hechos, muchos investigadores creen que la histerectomía laparoscópica como es practicada hoy ha contribuido a ninguna mejora sustancial en la atención al paciente, pero ha dado lugar a costes crecientes del cuidado de la salud (6) (7). Además, el aumento de la cuota de mercado del hospital se evapora a medida que los hospitales adquieran el robot da Vinci - en algunos casos, sin embargo la identificación de un equipo quirúrgico que tiene la intención de usarlo.
Las principales desventajas de la cirugía robótica en todas las aplicaciones son el costo, el gran tamaño de la consola del robot, la limitada disponibilidad de algunos sistemas de salud, la falta de retroalimentación táctil o háptica, y la necesidad de capacitar a los pobladores, que asisten a los cirujanos y personal de operación de sala en el uso de esta tecnología. Los costos adicionales que se deben considerar son el tiempo y coste de formación de cirujanos y el personal de sala de operaciones, el costo potencial o disminución de la productividad durante la curva de aprendizaje de un cirujano, y aumentó el tiempo quirúrgico asociado con la configuración de la sala de operaciones, así como el montaje y desmontaje de la sistema robótico durante la fase temprana de adopción. Hay pruebas de que con la experiencia, el tiempo quirúrgico puede ser más corto con la laparoscopia (5). Docking tiempo se ha demostrado que disminuye con la experiencia. Una vez acoplados, los brazos robóticos se adjuntan y se fija a los trocares especializados. Debido a la mesa de operaciones y el robot no se comunican y por tanto no sincronizada, una vez que la unidad de robótica está acoplado, la cama del paciente no puede moverse en cualquier dirección, incluida la de Trendelenburg, de lo contrario, la profundidad de trocar puede convertirse en una posición incorrecta y la pared abdominal, así como traumatismos viscerales podría ocurrir.
Dehiscencia de la cúpula vaginal, con la evisceración del intestino delgado después de la histerectomía es un evento raro que puede estar ocurriendo con mayor frecuencia con el advenimiento de la robótica histerectomías laparoscópicas. Sólo 59 casos fueron reportados entre enero 1900 y diciembre de 2001. 95% de los casos ocurrieron después de realizar abdominal total (TAH) o la histerectomía vaginal (TVH). Las revisiones recientes describen un número desproporcionado de cúpula vaginal dehiscencias ocurren después de la histerectomía total por laparoscopia (HTL), sugiriendo que la dehiscencia de la cúpula vaginal puede ser más común complicación de histerectomía laparoscópica que TAH o TVH. Una revisión retrospectiva de 2.399 histerectomías realizadas en la Clínica Mayo en Scottsdale, Arizona, de los cuales 15% fueron realizadas por robot y un 9% con la laparoscopia tradicional informó de la cúpula vaginal tasa de dehiscencia de ser el 2,87% para la histerectomía robótica y el 0,47%, 0,13% y 0,99 % para TLH, TVH, y TAH, respectivamente. Técnica Colpotomía puede explicar el aumento del riesgo observado de cúpula vaginal asociada con dehiscencia de la cirugía robótica. Esta observación puede ser debido a la difusión térmica y manguito de daño a los tejidos de electro-cirugía que se usa para colpotomía (8). Gancho monopolar y una mezcla de modos de coagulación y de corte, teóricamente, puede reducir el riesgo de dehiscencia de la cúpula vaginal. Alternativamente, un bisturí armónico que utiliza una alta frecuencia de vibración para el corte de la hoja se puede utilizar durante tanto robótica y tradicionales TLH.
Aplicaciones de la cirugía asistida por robot en General Ginecológica:
Robótica ha sido considerada como una posible manera de facilitar la tendencia hacia una histerectomía menos invasivo y los resultados de los pacientes. La disponibilidad del sistema robótico que no debería determinar la ruta de la histerectomía (endoscópica versus vaginal). Siempre que sea técnicamente viable y médicamente adecuados para los pacientes que requieren histerectomía se debe ofrecer la vía vaginal ya que la morbilidad parece ser menor con la vía vaginal que con cualquier otro método. Histerectomía endoscópica está indicada en los siguientes casos: lisis de adherencias, tratamiento de la endometriosis, la gestión de los leiomiomas uterinos, y / o masas anexiales que complican la realización de la histerectomía vaginal, la ligadura de los ligamentos infundibulopélvico para facilitar la extirpación de los ovarios difícil, y la evaluación de la pelvis y de la cavidad abdominal antes de la histerectomía.In 2002 this study (9) reported one of the earliest experiences with robot-assisted laparoscopic hysterectomy. This series include 16 patients ranging in age from 27 to 77 years. Operative time ranged from 270 to 600 minutes, and blood loss ranged between 50 mL and 1,500 mL, with an average loss of 300 mL. The average stay was 2 days, with a range of 1 to 3 days. Although their approach was labeled a laparoscopic hysterectomy, all cases in that series were Type IIB according to the American Association of Gynecologic Laparoscopists (AAGL) classification system of laparoscopic hysterectomy, meaning that the posterior culdotomy and ligation of the cardinal and uterosacral ligament complexes were performed vaginally to complete the hysterectomy (9) .
The comparative study (5) to date of robotic hysterectomy to conventional laparoscopy is a retrospective review of 200 consecutive hysterectomy cases completed before and after implementation of a robotics program. There were no statistically significances in patient characteristics or uterine weights between the two groups. The rate of intraoperative conversion to laparotomy was two-fold higher in the laparoscopic cohort of 100 patients as compared with the robotic cohort (9% compared with 4%). The mean blood loss was also significantly reduced in the robotic cohort. However, the incidence of adverse events was similar in the two groups. Mayo Clinic, Scottsdale, published the largest series to date (11) ; ninety-one patients undergoing robotic hysterectomy were evaluated. Those requesting lymphadenectomy were excluded. A wide range of pathology, including ovarian neoplasms, abnormal uterine bleeding, and moderate-to-severe endometriosis, was addressed. The average uterine weight was 135.5 grams. The mean operative time was 127.8 minutes, with an estimated blood loss of only 78.6 mL and hospital stay of 1.4 days. There were no conversions to conventional laparoscopy or laparotomy and no bladder or ureteral injuries occurred.
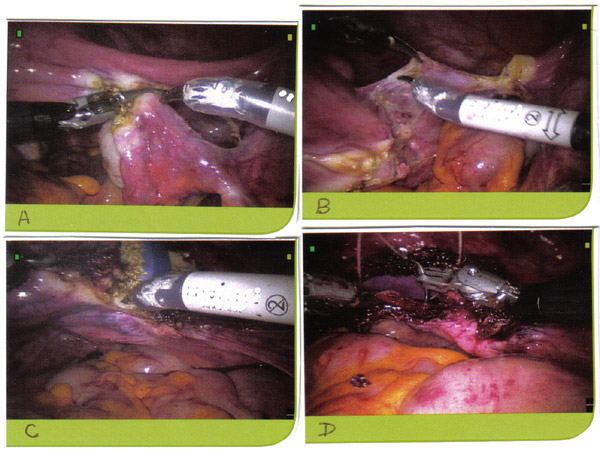
Asistida por robot histerectomía por enfermedades benignas, A. Skeletonizing pedículos vasculares y de coagulación, B. reflexión vésico-uterino; C. Colpotomía, D. cúpula vaginal cierre.
Aplicaciones de la cirugía asistida por robot en Oncología Ginecológica:
Una progresión natural de la tecnología robótica en ginecología ha sido el área de oncología. Las primeras experiencias demuestran claramente la viabilidad de la aplicación de la asistencia de robots para la estadificación del cáncer laparoscópica sin un aumento en las tasas de complicaciones o comprometer a la técnica quirúrgica. No hubo diferencias estadísticamente significativas entre estos tres enfoques: la laparotomía, la laparoscopia convencional y robótica, con respecto a la edad media, índice de masa corporal, o el recuento de los ganglios linfáticos (13). Sin embargo, los autores encontraron la pérdida de sangre significativamente menor estima y menor duración de la estancia asociados con el enfoque de la robótica. En este estudio, tiempos quirúrgicos son comparables a la cirugía abierta y mejor que la laparoscopia convencional. También hubo ninguna conversión o de complicaciones intraoperatorias en el grupo de robótica (12). Del mismo modo Boggess et al publicaron un estudio que comparaba asistida por robot, la histerectomía laparoscópica y abierta convencional con la clasificación para el cáncer de endometrio (14). Ellos encontraron el mayor rendimiento de ganglios linfáticos con el enfoque de la robótica. La histerectomía robótica con la puesta en escena se asoció significativamente con el tiempo ya operativos, en esta serie, en comparación con la histerectomía abierta, pero menor tiempo de funcionamiento cuando comparado con el grupo laparoscópico. En última instancia, la supervivencia a 5 años tendrá que ser evaluado para realmente evaluar el efecto de la robótica en la estadificación del cáncer ginecológico. La cirugía robótica es una herramienta mínimamente invasiva útil para la estadificación quirúrgica completa de los obesos mórbidos y mujeres obesos con cáncer de endometrio (12) (14). En esta población de pacientes con mayor riesgo de muerte por cualquier causa, incluyendo las complicaciones postoperatorias, todos los esfuerzos deben hacerse para mejorar sus resultados y la cirugía mínimamente invasiva constituye una plataforma útil que esto puede ocurrir.
Aplicaciones de la cirugía asistida por robot en Endocrinología Reproductiva:
La tecnología robótica también facilita la disección del mioma y la sutura de la incisión uterina. En un estudio caso-emparejado estudio comparativo de la miomectomía robótico para abrir la miomectomía, los investigadores informaron ya veces fallo en el grupo de robótica [media: 231 (+ / -85) vs 154 minutos (+ / - 43 minutos, p <.05], , pero disminuyó la pérdida de sangre [media: 195 (+ / - 228) mL vs media 364 (+ / - 473 ml, p <.05] y de menor duración de la estancia [media: 1,4 (+ / -0,9 días frente a 3,62 ( + / - 1,5 días, p <.05] en comparación con el grupo de laparotomía (15). Debido a diversos pasos de la miomectomía puede ser difícil con la laparoscopia convencional, existen muchas preocupaciones. En particular, la capacidad de enuclear leiomiomas y realizar un cierre de varias capas requiere de habilidades laparoscópicas avanzadas. Aunque las tasas de embarazo después de miomectomía logrado endoscópicamente son similares a los que después de la laparotomía, una mayor preocupación sigue siendo el riesgo de ruptura uterina. Además, el riesgo de recurrencia parece ser mayor después de la miomectomía laparoscópica en comparación con la laparotomía. Estos factores y la curva de aprendizaje asociada puede contribuir al hecho de que la miomectomía abdominal sigue siendo el método estándar (16).
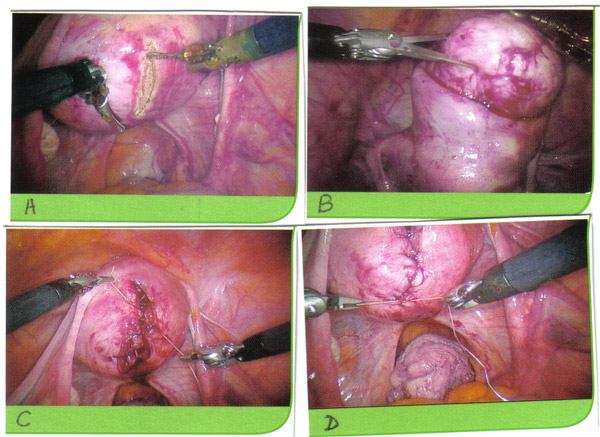
Asistida por robot miomectomía; Histerotomía A., B. Enucleación; C. Multi-sutura por capas de defecto - capas de profundidad; D. Multi-sutura por capas de defecto - la capa superficial.
La capacidad de aprovechar las ventajas de un sistema de visión avanzada junto con la precisión de la articulación de instrumentos de microcirugía endoscópica se ejemplifica en la cirugía ginecológica con reanastomosis tubárica. En 2007, DHARIA et al (4) compararon prospectivamente asistida por robot tubal anastomosis para abrir anastomosis tubárica con microcirugía en mujeres con antecedentes de ligadura tubárica bilateral que deseaban inversión. Encontraron robótica tubal anastomosis se asoció significativamente con el tiempo operatorio más largo (201 minutos en comparación con 155 minutos con libre) pero la duración hospitalaria significativamente más corta de la estancia (4 horas en comparación con 34,7 horas de apertura) y más rápido retorno a las actividades normales de la vida diaria (11,1 días en comparación con 28,1 días de abierto). Las tasas de embarazo fueron comparables en ambos grupos (62,5% frente al 50% con abierta), sin embargo, el grupo de robótica tenía un mayor número de embarazos ectópicos (4 frente a 1 con abierta). El costo por entrega fue similar entre anastomosis robótica (92.488 dólares) y abrir la anastomosis tubaria ($ 92.206).
Aplicaciones de la cirugía asistida por robot en Uroginecología / pélvica Reconstrucción:
Sacrocolpopexia es probablemente el de más rápido crecimiento procedimiento de reconstrucción que se realiza robótico. El procedimiento consiste en la disección extensa de espacio presacro y el tabique rectovaginal, la colocación de malla, la sutura, sutura y extra-corporales y el anudado, que se simplifica el sistema robótico. Hay cuatro principales estudios sobre sacrocolpopexia robótica. La fuerza principal de este estudio de cohorte retrospectivo (17) es el hecho de que los autores del informe sobre los resultados de sacrocolpopexia robótica en comparación con un grupo control de pacientes que se sometieron a sacrocolpopexia abdominal, el nivel avanzado criterio de prolapso de cúpula vaginal. Es fundamental incluir un grupo control para la comparación para evaluar la eficacia de esta nueva técnica quirúrgica mínimamente invasiva. Cabe señalar que el grupo de control en este estudio comprendía pacientes en la misma institución, expuestos a los mismos patrones de práctica sobre el cuidado perioperatorio, incluyendo la técnica quirúrgica similar, la profilaxis antibiótica y las directrices de descarga postoperatoria que el grupo de robótica. Otra fortaleza de este estudio es el uso de datos objetivos, en forma de POP-Q resultados, para la evaluación de resultados. Esto reduce al mínimo el sesgo que puede ser introducido por el diseño retrospectivo del estudio. Sacrocolpopexia Robótica demostrado similares a corto plazo bóveda vaginal de apoyo en comparación con sacrocolpopexia abdominal, con menos pérdida de sangre y de menor duración de la estancia. El tiempo operatorio fue más largo, pero puede disminuir la curva de aprendizaje para este nuevo procedimiento mejora. No hubo resultados similares entre los dos grupos en términos de complicaciones perioperatorias, pero esto está limitado por la baja incidencia de estas complicaciones. Los datos a largo plazo son necesarios para evaluar la durabilidad de abordaje mínimamente invasivo para el prolapso de esta nueva reparación. Robótica reparación de la fístula vesico-vaginal y de ureterovaginales se ha informado a través de pequeñas series de casos e informes de casos. En una serie de casos de siete pacientes con fístula vesico-vaginal, los investigadores informaron de un tiempo quirúrgico promedio de 141 minutos (rango de 110 a 160). El sangrado medio fue de 90 ml, y sin complicaciones intraoperatorias o postoperatorias significativas se observaron (18).
Curva de aprendizaje y acreditación:
La creencia es que la cirugía robótica permitirá un desarrollo más rápido de las capacidades necesarias y permitir un mayor número de cirujanos para lograr esas habilidades, y por lo tanto, ofrecer opciones quirúrgicas mínimamente invasivas a un mayor número de pacientes. Hay una escasez de cirujanos con experiencia robótica. En la actualidad, la formación incluye la práctica con el robot quirúrgico en cualquiera de cerdo o el Medio Ambiente Humano de tejido fresco para familiarizarse con las funciones del robot, la fijación de los brazos robóticos de los trócares robótica, y las funciones generales de la robótica de la consola. Además permite que el cirujano de formación para aprender a realizar maniobras sencillas como agarrar, cortar, y el nudo intracorpórea vinculación, la última tarea es particularmente difícil, con la laparoscopia convencional. Dos estudios han buscado específicamente a las curvas de aprendizaje. Un estudio reciente (19) evaluaron 113 pacientes secuencial durante un período de 22 meses. Ellos encontraron que la curva de aprendizaje de diversas intervenciones quirúrgicas benignas estabilizado en lo que respecta a veces el tiempo operatorio después de 50 casos. Una curva de aprendizaje similar fue documentado por el equipo de quirófano para poder configurar el robot para la cirugía en 30 minutos. Este punto de ruptura fue de 20 casos. Un importante obstáculo a menudo encontrados en la experiencia de principios de robótica de un cirujano es "tiempo de acoplamiento", o la inserción del dispositivo robótico para el paciente.
Con la introducción de la cirugía robótica, hospitales y departamentos han sido impugnados a establecer requisitos para la acreditación de esta técnica quirúrgica avanzada. No existen directrices de acreditación establecidos universalmente. La mayoría de las instalaciones de salud requieren realizar un mínimo de dos procedimientos quirúrgicos robóticos de cada tipo de privilegios para los que se solicitan en la presencia de un preceptor de expertos. Algunas instituciones están utilizando cuatro como el número mínimo de supervisado cirugías robóticas independientes de los privilegios necesarios para la robótica. Un preceptor de expertos se define como un cirujano que ha robóticos quirúrgicos actuales privilegios y ha sido aprobado como preceptor de expertos por el Presidente del Departamento de la persona que solicita para sus privilegios. Similar a otros procedimientos quirúrgicos de mantenimiento de la competencia requiere la realización de procedimientos sobre una base continua.
Futuro de la Cirugía Robótica:
En este futuro de alta tecnología, la cirugía podría ser realizada con habilidad y sin demora, incluso en lugares peligrosos o inaccible. Además de los lugares pequeños o restringido en el cuerpo humano, los lugares remotos en el mundo son a menudo mencionados por los que invocan la promesa de la cirugía robótica. La extensión lógica de este modo de operación - telecirugía podría ser una buena manera de distribuir la asistencia sanitaria en los países en desarrollo. Y la NASA está explorando su potencial para el proyecto de misión tripulada a la Luna ya Marte. Muchas de las desventajas que podría mejorarse con un mayor desarrollo y el perfeccionamiento tecnológico. La investigación futura es imprescindible para abordar las cuestiones de la relación coste-eficacia, el efecto sobre formación de los residentes, y si esta es la mejor tecnología disponible para todos los cirujanos o para un número limitado de cirujanos con alto volumen quirúrgico robótico que desarrollan la experiencia particular y son capaces de mantener de competencia con esta tecnología en evolución.
Telestration, the ability to write on a touch screen and have the markings visible at the console, is helpful but does not replace the educational guidance a "co-sugeon" training robotic console would afford. Such a "co-pilot" console is currently commercialy available with Si platform. Even as the current systems begin to be put in practice, the true visionaries are focusing on the surgical robot less as a mechanical device than as an information system -- one that should be fused with other information systems. One proposed example of this kind of fusion is image-guided surgery, also called surgical navigation. Robot-assisted surgeons will be able to see real-time, three-dimensional scanner images electronically superimposed over the operative field that is displayed on the monitor (20) . In other words, on the screen, human anatomy will be rendered translucent, and the surgeon will be able to determine the exact location of a tumor and more readily avoid damaging vital structures -- such as the major intraparenchymal vessels and bile ducts that are sometimes accidentally severed or the inferior vana cava during lymph-node dissection during gynecologic oncology cases or during right adrenalectomy. In fact, with preoperative scanner images, surgeons could robotically practice their patients' surgery the night before, and the robot's computer could be programmed not to allow its instruments to penetrate the vena cava, thereby eliminating bloody intraoperative mishaps.
Resumen:
Robotic surgery has seen enormous growth over the past decade. Because robotic technology allows surgeons to easily and simply perform complex laparoscopic maneuvers, it has already revolutionalized laparoscopic urologic and oncologic surgery. Several studies done have linked robotic technology with faster performance, better accuracy, faster suturing, and fewer errors when compared to conventional laparoscopic intrumentation. Advantages include: dexterity, precision, three dimensional imaging and reduced surgeons's fatigue. Its limitations are: lack of tactile feedback, increased cost, a bulky system. Well-designed randomized trials comparing routes of surgery with clinically meaningful long-term outcomes are needed. These outcomes include effect on quality of life and patient satifaction associated with hysterectomy, recurrence, and survival rates for oncology procedures, future fertility rates and pregnancy outcomes associated with tubal reanastomosis or myomectomy, and reoperation rates for urinary incontinence or recurrent pelvic organ prolapse.
Acknowledgement:
La gratitud se expresa el Dr. James L. Whiteside, Departamento de Obstetricia y Ginecología, Dartmouth Medical School y Dartmouth-Hitchcock Medical Center, Lebanon, New Hampshire (EE.UU.) por las opiniones de expertos y la revisión del papel. Un agradecimiento especial a Kendra Martell y Jonathan Conta, Intuitive Surgical Inc, Sunnyvale, CA para la asistencia con la investigación y de apoyo.
Referencias:
- Stylopoulos N, Rattner D. Robotics and ergonomics. Surg Clin North Am 2003;83:1321-1337
- Satava RM. Robotic surgery: from past to future -- a personal journey. Surg Clin North Am 2003;83:1491-1500,xii
- Camarillo DB, Krummel TM, Salisbury JK Jr. Robotic surgery: past, present, and future. Am J Surg 2004;188:Suppl:2S-15S
- Visco AG, Advincula AP. Robotic gynecologic surgery. Obstet Gynecol 2008;112:1369-1384
- Payne TN, Dauterive FR. A comparison of total laparoscopic hysterectomy to robotically assisted hysterectomy: surgical outcomes in a community practice. J Minim Invasive Gynecol 2008;15:286-291
- Wu JM, Wechter ME, Geller EJ et al. Hysterectomy rates in the United States, 2003 Obstet Gynecol 2007;110:1091-1095
- Meeks GR. Advanced laparoscopic gynecologic surgery. Surg Clin North Am 2000;80:1443-1464
- Robinson BL, Liao JB, Adams SF et al. Vaginal cuff dehiscence after robotic total laparoscopic hysterectomy. Obstet Gynecol 2009;114:369-371
- Diaz-Arrastia C, Jurnalov C, Gomez G et al. Laparoscopic hysterectomy using a computer-enhanced surgical robot. Surg Endosc 2002;16:1271-1273
- Olive DL, Parker WH, Cooper JM et al. The AAGL classification system for laparoscopic hysterectomy. Classification committee of the American Association of Gynecologic Laparoscopists (AAGL). J Am Assoc Gynecol Laparosc 2007;7:9-15
- Kho RM, Hilger WS, Hentz JG et al. Robotic hysterectomy: technique and initial outcomes. Am J Obstet Gynecol 2007;197:113.e1-4
- Veljovich DS, Paley PJ, Drescher CW et al. Robotic surgery in gynecologic oncology: program initiation and outcomes after the first year with comparison with laparotomy for endometrial cancer staging. Am J Obstet Gynecol 2008;198:679.e1-9
- Magrina JF, Kho RM, Weaver AL et al. Robotic radical hysterectomy: comparison with laparoscopy and laparotomy. Gynecol Oncol 2008;109:86-91
- Boggess JF. Robotic-Assisted Hysterectomy for Endometrial Cancer. National Library of Medicine Archives. http://www.nlm.nih.gov/medlineplus/surgeryvideos.html Accessed September 22, 2009
- Advincula AP, Xu x, Goudeau S et al. Robotic-assisted laparoscopic myomectomy versus abdominal myomectomy: a comparison of short-term surgical outcomes and immediate costs. J Minim Invasive Gynecol 2007;14:698-705
- Advincula AP, Song A. The role of robotic surgery in gynecology. Curr Opin Obstet Gynecol 2007;19:331-336
- Geller EJ, Siddiqui NY, Wu JM et al. Short-term outcomes of robotic sacrocolpopexy compared with abdominal Sacrocolpopexy. Obstet Gynecol 2008;112:1201-1206
- Hemal AK, Kolla SB, Wadhwa P. Robotic reconstruction for recurrent supratrigonal vesicovaginal fistulas. J Urol 2008;180:981-985
- Leihan JP Jr, Kovanda C, Seshadri-Kreaden U. What is the learning curve for robotic assisted gynecologic surgery? J Minim Invasive Gynecol 2008;15:589-594
- Ota T, Degani A, Schwartzman D et al. A highly articulated robotic surgical system for minimally invasive surgery. Am Thorac Surg 2009;87:1253-1256
Publicado: 23 November 2009
Dedicated to Women's and Children's Well-being and Health Care Worldwide
www.womenshealthsection.com