


Robotic Chirurgie Gynécologique
WHEC Bulletin de pratique et de directives cliniques de gestion pour les fournisseurs de soins de santé.
La concession éducative a fourni par Women's Health and Education Center (WHEC).
Techniques chirurgicales minimalement invasives pour effectuer des hystérectomies et d'autres chirurgies gynécologiques ont été montrés pour réduire la morbidité des patients et de raccourcir les séjours hospitaliers. La laparoscopie est devenu un précurseur dans la poursuite de l'amélioration des résultats chirurgicaux en réduisant la douleur postopératoire et diminuant le temps de récupération. Toutefois, l'utilisation des instruments de laparoscopie peut être lourd et peu maniable, ce qui augmente le temps opératoire et la réduction de la dextérité, ce qui peut limiter la capacité du chirurgien pour effectuer la procédure avec les mêmes techniques qui peuvent être accomplies par une incision abdominale traditionnelle. Introduit en 1999, le Da Vinci Surgical System, les urologues sont toujours considérées comme le numéro du système d'un utilisateur, mais les applications robotiques en chirurgie gynécologique ont été en expansion. En 2005, la US Food and Drug Administration l'approbation a été obtenue pour l'utilisation du robot Da Vinci (Intuitive Surgical, Inc, Sunnyvale, CA) pour une utilisation en chirurgie gynécologique comme une modification de l'approche laparoscopique. Ce robot emploie l'utilisation des bras robotiques qui contrôlent modification des instruments de laparoscopie qui ont sept degrés de liberté, qui permet au chirurgien sensiblement amélioré sa dextérité. L'avènement de cette technologie a permis d'effectuer les procédures traditionnelles gynécologiques grâce à une technique laparoscopique qui permet pour la facilité de manuvre, combinant ainsi les avantages d'une intervention chirurgicale minimalement invasive avec une période de récupération plus courte. L'utilisation de la robotique en chirurgie gynécologique est en hausse aux États-Unis. Une décennie plus tard, un nombre croissant d'établissements de santé sont l'achat du système robotique. En gynécologie l'expansion est reflétée dans les rapports de la littérature sur les applications robotiques en gynécologie générale, uro-gynécologie / chirurgie reconstructive pelvienne, l'oncologie gynécologique, et l'endocrinologie de la reproduction.
Le but de ce document est d'examiner l'adoption récente, l'expérience, et les applications de robotique assistée par laparoscopie dans la chirurgie gynécologique. Il faudra sans doute continuer à se développer en tant que plus de chirurgiens gynécologiques sont formés et plus de patients cherchent des options chirurgicales minimalement invasives. Bien conçu, d'études prospectives bien définies cliniques, les résultats à long terme, y compris les complications, le coût, la douleur, le retour à une activité normale, et la qualité de vie, sont nécessaires pour évaluer pleinement la valeur de cette nouvelle technologie. Innovation chirurgicale est nécessaire. Il ya des questions éthiques et sociétales qui restent mal connus sur l'utilisation de la chirurgie robotique.
Histoire et développement de la chirurgie assistée par robot:
L'utilisation de robots en chirurgie est venu seulement au cours des 25 dernières années. La première application d'une chirurgie robot a été en neurochirurgie. Les limitations rencontrées avec la laparoscopie conventionnelle comprennent des contre-mouvements de la main intuitive, deux visualisation de dimensions, et les degrés de mouvement limitée instrument dans le corps ainsi que la difficulté d'ergonomie et de l'amplification des tremblements (1). Dans une tentative pour surmonter ces obstacles, la robotique a été récemment intégrée dans l'arsenal gynécologique. Le modèle original, connu comme le PUMA 560 (Stäubli Corporation, Duncan, SC), a été utilisé pour les manoeuvres de neurochirurgie stéréotaxique sous tomodensitométrie (CT) guidance. Bientôt, la chirurgie orthopédique a utilisé un appareil appelé ROBODOC (Curexo Technology Corporation, Sacramento, CA) à l'Aide à prothèses totales de hanche, et l'urologie effectuait une résection transurétrale de la prostate avec un robot à travers les conseils d'un pré-opératoire construit image en trois dimensions. Commun entre ces robots début était le fait qu'ils ont été développés pour fonctionner de manière autonome avec un plan de pré-opératoire ou dans un rôle de supervision. Ce rôle passif ferait évoluer vers une plus actif, avec un environnement immersif qui devint connu comme la technologie de téléprésence robotique. Le concept de technologie de téléprésence robotique est né grâce à la collaboration de l'Institut de recherche de Stanford, le ministère de la Défense, et la National Aeronautics and Space Administration (NASA) (2). La recherche a été dirigée vers permettant aux chirurgiens militaires pour effectuer des interventions chirurgicales sur des soldats blessés à partir d'un endroit sûr et éloigné. Comme la technologie développée, la recherche axée non pas sur la téléchirurgie, mais sur l'utilisation de la chirurgie robotique pour améliorer encore la chirurgie laparoscopique et mini-invasives dans les salles d'opération civil. Ces avances est devenue possible grâce aux systèmes de vision améliorée, les instruments d'articuler extrémités distales et l'amélioration de l'ergonomie (1) (2).
Bien que la technologie de téléprésence robotique a été initialement créé pour la chirurgie cardiaque, il a bientôt été appliqué aux domaines de l'urologie et la gynécologie. Aujourd'hui il n'ya qu'un seul US Food and Drug Administration a approuvé dispositif pour la robotique chirurgicale. Cette plate-forme robotique actuelle est connu comme le système chirurgical da Vinci (Intuitive Surgical, Sunnyvale, CA). Les avancées technologiques clés vus avec les prédécesseurs antérieures ne sont pas seulement intégrés dans la plate-forme d'aujourd'hui, mais sont encore affinés. En 2000, la Food and Drug Administration américaine a approuvé l'utilisation d'un système robotique pour la laparoscopie, et plus particulièrement pour l'hystérectomie en 2005. La chirurgie robotique permet à un chirurgien de s'asseoir à une console alors que trois ou quatre bras robotisé se déplacer sur le patient en fonction de commandes de l'opérateur. Couramment effectuées robot-assisted laparoscopic chirurgies en gynécologie compte l'hystérectomie bénigne, la myomectomie, réanastomose des trompes, une hystérectomie radicale, la dissection des ganglions lymphatiques, et sacrocolpopexies.
Indications et contre-indications pour la chirurgie assistée par robot:
Chirurgie assistée par robot a des indications similaires concernant la chirurgie laparoscopique conventionnelle. Toutefois, parce que la technologie robotique chirurgicale, permet de plus facilement et plus simplement accomplir les manuvres complexes par laparoscopie, la disponibilité du robot permettant au chirurgien de réaliser des procédures plus sophistiquées que la voie laparoscopique conventionnels, réduisant donc le nombre de procédures ouvertes. Par exemple, un chirurgien gynécologique pourraient normalement préférer une procédure ouverte sur le parcours classique laparoscopique avancée pour l'endométriose pelvienne. Toutefois, avec la disponibilité du système robotique, ce qui facilite la dissection des tissus et la suture, le chirurgien mai élire l'approche de la robotique, provoquant une morbidité réduite, une hospitalisation plus courte, moins de douleur post-opératoire, au début de retour au travail, et de meilleurs résultats esthétiques par rapport à une opération ouverte. Contre-indications, aussi, sont généralement similaires à ceux de la laparoscopie conventionnelle (par exemple, immédiate nécessité d'une laparotomie pour contrôler le saignement, la visualisation pauvres, ou l'exposition). Le système robotisé raccourcit habituellement le temps opératoire d'une procédure endoscopique longue (par exemple, l'hystérectomie radicale, lymphadénectomie, sacrocolpopexie). D'autre part, elle mai augmenter le temps total d'une procédure simple et bref (par exemple, annexectomie, la stérilisation par voie endoscopique). Lorsque vous ajoutez dans le temps passé en drapage et la mise en place du robot, l'amarrage du temps et d'exploitation en temps le chiffre d'affaires chambre, en utilisant le système robotique dans de simples procédures de court endoscopique mai ne pas être rentable.
Basic Set-up et instruments:
Un système de robotique chirurgicale de base est composé de trois parties: un patient-robot côté, un panier de vision, et le capitaine robotique console. Le chirurgien opère à partir de robotique le maître de console distante en utilisant une combinaison des commandes manuelles et pédales. Une pédale contrôle le mouvement de la caméra (à droite / gauche, haut / bas, dedans / dehors) et en position horizontale, tandis qu'une pédale de contrôle à proximité du foyer. Un autre pédale offre un mécanisme d'embrayage qui permet de repositionner les commandes manuelles et fournit les instruments de la plage de mouvement au-delà des limites physiques de la console. Une autre série de pédales de contrôle à la fois monopolaire et bipolaire sources d'énergie. Le patient-chariot à roues en latéral est entre les jambes du patient, et les bras robotisés sont joints à la trocarts en acier inoxydable robotique grâce à un processus appelé «docking». Les commandes manuelles fonctionnent soit l'appareil ou jusqu'à deux instruments robotiques à la fois. Il ya jusqu'à trois bras robotisés du dispositif, avec la possibilité d'échanger de contrôle entre deux quelconques des trois bras du dispositif. Tout en exploitant les instruments robotique opératoire, le chirurgien est capable de manipuler, repositionnement, saisir, se rétracter, la coupe, de dissection, de coagulation, et la suture. Le capitaine robotique console offre également au chirurgien imagerie en trois dimensions, à travers une visionneuse stéréoscopique. Les instruments suivants sont utilisés pour la plupart des chirurgies gynécologiques:

daVinci Robot et EndoWrist Instruments ® couramment utilisés pour les chirurgies gynécologiques.
À la différence des robots industriels, ces systèmes ne sont pas autonomes, et d'être correct sur le plan taxonomique, ils ne devraient pas être nommés machines. Un robot chirurgical est en fait une collection d'outils wristed appelés manipulateurs, qui reçoivent des instructions numériques d'un ordinateur interfacé. Le chirurgien, assis à une vidéo ergonomique console avec une "immersion" 3-D d'affichage, initie les instructions numériques en contrôlant les poignées sophistiqués - pour l'essentiel, manettes de jeux avec sept degrés de liberté, (ajout de la hauteur, le mouvement de lacet et la pince -comme le mouvement à ceux qui étaient déjà disponibles). Les manipulateurs dans le corps du patient en double mouvements de la main du chirurgien à la console, et les filtres de logiciel dehors même des tremblements des mains physiologique (3). Malgré toutes ces avancées technologiques qui rendent le chirurgien presque autonome, un assistant de chevet est toujours requise pour tous les robot-assisted cas. Leur responsabilité consiste essentiellement en échanges instrument, d'aspiration et d'irrigation, l'introduction de suture et l'extraction, la sortie et la rentrée supplémentaire.
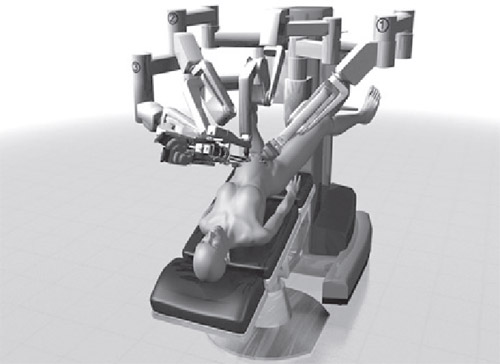
Positionnement des patients, mise en place et à l'amarrage du robot pour la robotique assistée chirurgies gynécologiques.
Docking le robot et l'instrument de sélection:
Le système des deux principales composantes sont le chirurgien de la console et la colonne de robotique. Après l'intubation endotrachéale, la situation du patient en position gynécologique dorsale avec les deux bras niché confortablement. Un trocart ombilical de 12 mm est placé en utilisant la technique ouverte Hasson. Two 8-mm spécialement conçus trocarts robotique sont placées bilatéralement 10 cm latéral et au niveau de l'ombilic. Pendant ce temps, d'un accessoire 10-trocart mm est placé entre le port ombilical et le port latéral gauche 3 cm céphalique à l'ombilic. Lorsque le bras robotique quatrième est utilisé, que trocart est placé à 10 cm et 10 cm latéral caudal le trocart robotique droite. La table d'opération est abaissé au niveau le plus bas et assez de Trendelenburg est obtenu pour permettre la suppression de l'intestin de bassin, jusqu'à 30 º chez les patients obèses. La colonne de robotique de pointe et est placé entre les jambes du patient. Ensuite, la laparoscopie robotisée (InSite Vision System; Intuitive Surgical) est attaché à le trocart ombilical, et les deux bras robotisés sont attachés à la trocarts latéraux robotique. Le chirurgien est assis, unscrubbed à la console. L'assistant est assis sur le côté gauche du patient en utilisant la main droite pour aider le chirurgien à travers le port d'accessoires (par exemple, la rétraction, l'introduction des points de suture et l'irrigation d'aspiration, d'un navire d'étanchéité et de récupération de spécimens) et vice-versa pour un gaucher assistant. Avec S et Si amarrage côté du quai rend l'accès plus facile par voie vaginale.
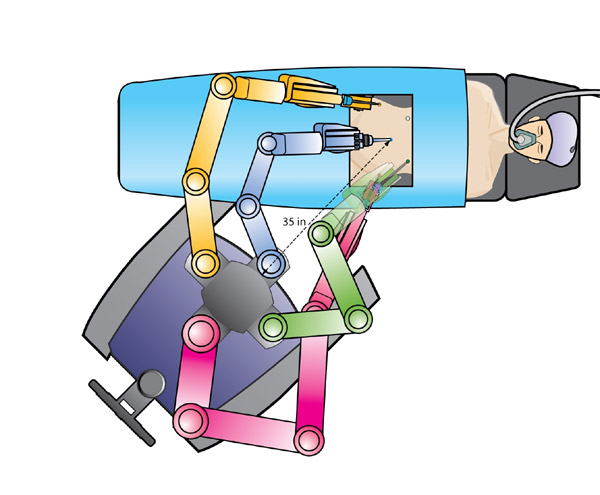
S et Si la plate-forme mise en place pour l'amarrage côté
Une variété d'instruments EndoWrist ® sont disponibles pour la chirurgie robotique gencologic, cependant, le chirurgien doit limiter l'échange intrument pour une procédure efficace et de minimiser les coûts. Pour la plupart des patients la spatule monopolaire ou des ciseaux sont utilisés avec le bras droit de robotique, et PK (plasma cinétique) sur le bras gauche robotique. Une pince (Prograsp) instrument est inséré avec le quatrième bras robotisé chaque fois qu'elle est utilisée. Lorsque la suture est nécessaire, le bon instrument robotisé est sous tension pour un porte-aiguilles Mega, qui est également capable de couper des fils de suture.
Avantages de la Chirurgie Robotique:
La chirurgie robotique offre trois avantages par rapport à la laparoscopie: un système de vision en trois dimensions, de l'instrumentation wristed et le positionnement ergonomique pour le chirurgien lors de l'exécution des interventions chirurgicales. La chirurgie laparoscopique conventionnelle a une courbe d'apprentissage pour les médecins parce qu'il a deux-imagerie tridimensionnelle et implique la maîtrise des contre-mouvements de la main intuitive. La chirurgie robotique, cependant, permet de résoudre certains de ces défis, car il utilise l'imagerie tridimensionnelle et les instruments qui se déplacent tout comme le poignet du chirurgien. Le système robotisé élimine les tremblements de la main normale et permet au chirurgien de siéger, au lieu de peuplement, au cours de la procédure, qui permet de protéger contre la fatigue. Le chirurgien gynécologique laparoscopique effectue les procédures dans un espace confiné, le bassin féminin. Instrumentation Wristed permet au chirurgien gynécologique pour obtenir l'angle exact instrument disponible à la laparotomie. Cela élimine également l'effet de point d'appui qui est présent avec la laparoscopie, où les chirurgiens ont besoin de passer la main dans le sens opposé à l'emplacement prévu de la pointe distale instrument (par exemple, vers le patient gauche si ils veulent l'instrument déplacé vers la droite du patient) . Avec la chirurgie robotisée, les mouvements sont naturels, et se déplace chirurgien leurs mains dans n'importe quelle direction ils veulent les instruments à se déplacer. Le «wristed" instrumentation permet une plus grande dextérité et offre sept degrés de liberté, semblable à la main de l'homme (4). Trois degrés sont fournis par les bras robotisés trocarts attaché à la paroi abdominale (insertion, tangage, lacet), et quatre degrés résulter de la «wristed" instruments (tangage, lacet, roulis et adhérence). Le pas de termes, le roulis et le lacet sont les trois caractéristiques qui décrivent les rotations en trois dimensions autour de l'instrument robotisé de coordonnées de l'origine du système, le centre de masse. Pitch est la rotation autour de l'axe latéral. Le lacet est une rotation autour de l'axe vertical, et le roulis est une rotation autour de l'axe longitudinal.
Diminution de la perte de sang a été rapportée dans les études comparatives (5). La visualisation améliorée donne le chirurgien gynécologique une meilleure capacité à identifier les plans de tissus, les vaisseaux sanguins et des nerfs dans l'exercice de la procédure chirurgicale. La fatigue et l'inconfort physique peut devenir limitations au cours d'une intervention chirurgicale. Avec la chirurgie robotisée, le chirurgien est assis confortablement à la console chirurgicale du point de vue de standing à la tête du patient et manipule les commandes manuelles et pédales tandis que dans une position ergonomique. Cette mai servent à réduire la fatigue et l'inconfort lors des procédures chirurgicales complexes. TilePro (Intuitive Surgical, Inc Sunnyvale, Californie) est une fonctionnalité qui permet pour l'image et l'entrée vidéo sur la console. Ceci peut être vu par la console chirurgien à des fins pédagogiques au cours de la phase initiale de la courbe d'apprentissage ou pour la saisie des données radiologiques de l'échographie, la tomodensitométrie (TDM) ou l'imagerie par résonance magnétique (IRM).
Inconvénients de la Chirurgie Robotique:
Le robot Da Vinci coûts de 1,65 million de dollars pour acheter les frais d'entretien annuels de cette technologie est $ 149,000 par année. Mini-invasive des approches hystérectomie (vaginale et laparoscopique) sont sous-utilisées dans les États-Unis. Par exemple, des hystérectomies fait pour les sept premiers non-diagnostics de cancer aux États-Unis, environ 66,1% ont été abdominale, 21,8% ont été réalisées par voie vaginale, et seulement 11,8% ont été réalisées par laparoscopie (4) (6). Est-ce que la chirurgie robotique améliorer sensiblement les résultats sur les routes par voie vaginale ou par laparoscopie conventionnelle? Introduite dans les années 1990, laparoscopique assistée hystérectomie vaginale (cliovaginale) a été appelé à remplacer l'hystérectomie »« à l'aveugle par voie vaginale, et pourtant dans un essai randomisé, la seule différence significative entre ces approches chirurgicales a été deux fois le coût d'inclure la laparoscopie. Des études de suivi n'a avantages montrer au cliovaginale relative à l'hystérectomie effectuée par laparotomie, mais ces chiffres ont été stables, tandis que l'hystérectomie vaginale nombre a diminué, sans doute au détriment de cliovaginale. Considérant ces faits, beaucoup de chercheurs croient que l'hystérectomie par voie laparoscopique tel qu'il est actuellement pratiqué a contribué à aucune amélioration substantielle dans les soins aux patients, mais a conduit à des coûts de soins de santé a augmenté (6) (7). En outre, augmenté la part de marché des hôpitaux comme hôpitaux s'évapore plus acquérir le robot Da Vinci - dans certains cas, sans identifier le moment une équipe chirurgicale qui a bien l'intention de l'utiliser.
Les principaux inconvénients de la chirurgie robotique à travers des applications sont le coût, la grande taille du robot console, la disponibilité limitée dans certains systèmes de santé, le manque de rétroaction tactile ou haptique, et la nécessité de former des résidents, assister les chirurgiens et le personnel des salles d'exploitation sur l'utilisation de cette technologie. Les coûts supplémentaires qui doivent être considérés incluent le temps et le coût de la formation de chirurgiens et d'exploitation personnel de la salle, le coût potentiel ou la productivité réduite au cours de la courbe d'apprentissage d'un chirurgien, et l'augmentation du temps opératoire associé à l'installation en salle d'opération ainsi que le montage et le démontage de la Système robotique au cours de la première phase d'adoption. Il est prouvé que l'expérience, la durée opératoire peut devenir plus courte avec la laparoscopie (5). Docking temps a été montré à diminuer avec l'expérience. Une fois amarré, les bras robotisés sont attachés et fixés à trocarts spécialisés. Parce que la table d'opération et le robot ne communiquent pas et ne sont donc pas synchronisés, une fois l'unité robotisée est à quai, du lit du patient ne peut être déplacé dans n'importe quelle direction, y compris Trendelenburg, sinon, la profondeur trocart peut devenir une mauvaise position et la paroi abdominale ainsi que les traumatismes viscéraux pourrait se produire.
Vaginale déhiscence avec l'éviscération de l'intestin grêle après une hystérectomie est un événement rare qui mai se produire plus fréquemment avec l'avènement de l'hystérectomie laparoscopique. Seuls 59 cas ont été signalés entre Janvier 1900 et Décembre 2001. 95% des cas réalisées ont eu lieu après total abdominale (laparotomie) ou une hystérectomie vaginale (TVH). Des études récentes décrivent un certain nombre disproportionné de la vaginale déhiscences survenant après une hystérectomie totale laparoscopique (TLH), suggérant que vaginale déhiscence mai être plus fréquente des complications de l'hystérectomie par voie laparoscopique de TAH ou TVH. Une étude rétrospective de 2399 hystérectomies pratiquées à la clinique Mayo à Scottsdale, en Arizona, dont 15% ont été réalisées par robotique et 9% avec laparoscopie traditionnelles faisaient état de la collerette vaginale taux de déhiscence à 2,87% pour l'hystérectomie robotique et de 0,47%, 0,13% et 0,99 % pour TLH, TVH, et TAH respectivement. Colpotomie technique mai tenir compte du risque accru observé de déhiscence vaginale associée à la chirurgie robotisée. Cette observation mai-être parce que de la propagation thermique et le brassard dommages aux tissus de l'électro-chirurgie utilisés pour colpotomie (8). Crochet monopolaire et un mélange de la coagulation et des modes de coupe peut théoriquement réduire le risque d'vaginale déhiscence. Alternativement, un scalpel harmonique, qui utilise une fréquence haute lame vibrante pour la coupe mai être utilisé pendant les deux robots et TLH traditionnels.
Applications de la chirurgie assistée par robot en général gynécologique:
Robotics a été regardé comme un moyen possible de faciliter la tendance à une hystérectomie moins invasives et les résultats des patients. La disponibilité du système robotique doit pas dicter la voie de l'hystérectomie (endoscopique vs vaginale). Chaque fois que cela est techniquement possible et médicalement appropriés, les patients nécessitant une hystérectomie devrait offrir à la voie vaginale, car la morbidité semble être plus faible à l'approche vaginale qu'avec toute autre méthode. Hystérectomie endoscopique est indiqué dans les cas suivants: lyse des adhérences, de traitement de l'endométriose, la gestion des fibromes utérins et / ou de masses annexielles qui compliquent la performance de l'hystérectomie vaginale, la ligature des ligaments infundibulo-ovarique pour faciliter l'ablation des ovaires difficiles et l'évaluation de la pelvienne et de la cavité abdominale avant l'hystérectomie. En 2002 cette étude (9) rapporté l'une des premières expériences avec le robot-assisted laparoscopic hystérectomie. Cette série comprend 16 patients âgés de 27 à 77 ans. Le temps opératoire variait de 270 à 600 minutes, et la perte de sang variaient entre 50 ml et 1500 ml, avec une perte moyenne de 300 mL. Le séjour moyen était de 2 jours, avec une fourchette de 1 à 3 jours. Bien que leur approche a été marqué une hystérectomie par voie laparoscopique, tous les cas dans cette série étaient de type IIB, selon l'Association américaine des Laparoscopists gynécologique (AAGL) système de classification de l'hystérectomie par laparoscopie, ce qui signifie que le culdotomy postérieure et la ligature des complexes ligament cardinal et utéro-sacrés ont été réalisées par voie vaginale pour terminer l'hystérectomie (9).
L'étude comparative (5) à ce jour de l'hystérectomie robotique à la laparoscopie conventionnelle est une revue rétrospective de 200 cas d'hystérectomie consécutives complété avant et après la mise en uvre du programme de robotique. Il n'y avait pas statistiquement significations dans les caractéristiques du patient ou poids de l'utérus entre les deux groupes. Le taux de conversion peropératoire de la laparotomie était deux fois plus élevés dans la cohorte de 100 patients par laparoscopie par rapport à la cohorte de robotique (9% contre 4%). La perte sanguine moyenne a été également significativement réduite dans la cohorte de robotique. Toutefois, l'incidence des événements indésirables a été similaire dans les deux groupes. Mayo Clinic, Scottsdale, la plus grande série publiée à ce jour (11); quatre-vingt onze patients devant subir une hystérectomie robotiques ont été évalués. Ces lymphadénectomie requérant ont été exclus. Un large éventail de pathologies, y compris les tumeurs de l'ovaire, saignements utérins anormaux, et modéré à l'endométriose sévère, a été adressée. Le poids de l'utérus moyenne était de 135,5 grammes. La durée opératoire moyenne contre 127,8 minutes, avec une perte de sang estimée à seulement 78,6 mL et l'hospitalisation de 1,4 jours. Il n'y avait pas de conversions à la laparoscopie conventionnelle ou laparotomie et pas de vessie ou des blessures urétéral survenu.
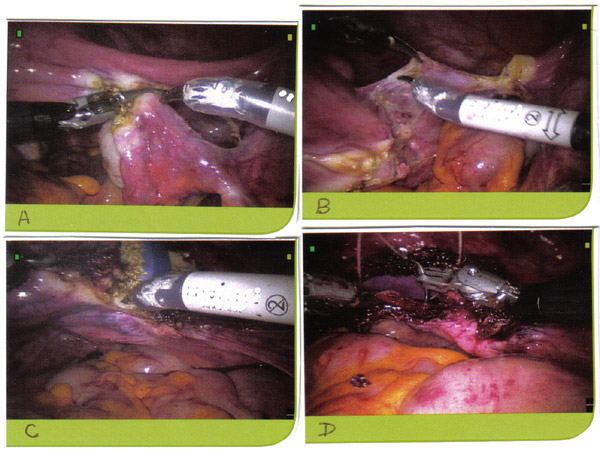
Robot-assisted hystérectomie pour des affections bénignes; A. Skeletonizing pédicules vasculaires et de coagulation; B. vésico-utérine réflexion; C. colpotomie; D. vaginale fermeture.
Applications de Robot-assisted surgery in Gynecologic Oncology:
Une progression naturelle de la technologie robotique en gynécologie a été à la zone de l'oncologie. Premières expériences ont clairement démontré la faisabilité de l'application d'assistance robotisée pour la stadification du cancer laparoscopique sans une augmentation des taux de complications ou de compromis à la technique chirurgicale. Il n'y avait pas de différences statistiquement significatives entre ces trois approches: une laparotomie, conventionnel laparoscopique, et robotique, à l'égard de moyenne d'âge, indice de masse corporelle, ou de compter des ganglions lymphatiques (13). Toutefois, les auteurs ont trouvé une perte beaucoup moins estimé sang et séjours de courte durée associées à l'approche robotique. Dans cette étude, les temps opératoires étaient comparables à la chirurgie ouverte et mieux que la laparoscopie conventionnelle. Il y avait aussi pas de conversion ou de complications peropératoires dans le groupe de robotique (12). De même Boggess et al ont publié une étude comparant le robot-assistée, l'hystérectomie laparoscopique et conventionnelle ouverte avec mise en scène pour le cancer de l'endomètre (14). Ils ont trouvé le meilleur rendement des ganglions lymphatiques à l'approche robotique. Hystérectomie robotiques avec mise en scène a été associé de façon significative avec le temps sera plus opérationnel, dans cette série, par rapport à l'hystérectomie ouvert, mais la réduction des temps opératoires en comparaison avec le groupe laparoscopique. En fin de compte, 5 taux de survie à un an devront être évaluées afin de véritablement évaluer l'effet de la robotique sur la stadification du cancer gynécologique. La chirurgie robotique est un outil utile à effraction minimale pour la stadification chirurgicale complète de l'obèse et les femmes souffrant d'obésité morbide avec cancer de l'endomètre (12) (14). Comme cette population de patients à risque accru de décès toutes causes confondues, y compris les complications post-opératoires, tous les efforts devraient être faits pour améliorer leurs résultats et de la chirurgie mini-invasive constitue une plateforme utile à laquelle la présente mai se produire.
Applications de la chirurgie assistée par robot en endocrinologie de la reproduction:
La technologie robotique facilite également la dissection du myome et la suture de l'incision utérine. Dans une rétrospective cas appariés étude comparant myomectomie robotique pour ouvrir la myomectomie, les enquêteurs ont signalé une durée opératoire dans le groupe de robotique [moyenne: 231 (+ / -85) minutes contre 154 (+ / - 43 minutes, p <.05], mais a diminué les pertes sanguines [moyenne: 195 (+ / - 228) ml vs moyenne 364 (+ / - 473 ml, p <.05] et à plus courte durée du séjour [moyenne: 1.4 (+ / -0,9 jours vs 3,62 ( + / - 1.5 jours, p <.05] en comparaison avec le groupe laparotomie (15). Parce que les différentes étapes de la myomectomie peut être difficile avec la laparoscopie conventionnelle, de nombreuses inquiétudes existent. En particulier, la capacité à énucléer léiomyomes et d'effectuer la fermeture d'une multicouche exige des compétences avancées laparoscopique. Bien que les taux de grossesse après myomectomie par voie endoscopique sont similaires à celles observées après laparotomie, une préoccupation majeure demeure le risque de rupture utérine. En outre, le risque de récidive semble être plus élevé après myomectomie laparoscopique par rapport à la laparotomie. Ces facteurs et la courbe d'apprentissage connexes mai contribuent au fait que la myomectomie abdominale reste l'approche standard (16).
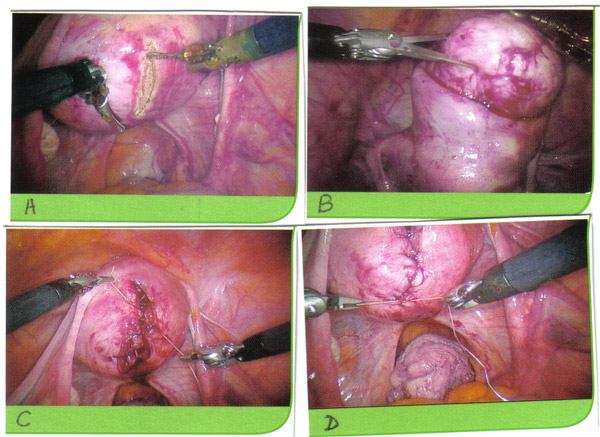
Robot-assisted myomectomie; A. Hystérotomie; B. énucléation; C. Multi-fermeture de suture couches de défauts - les couches profondes; D. multi-couches de fermeture de suture de défauts - la couche superficielle.
La capacité de tirer parti des avantages d'un système de vision avancé avec la précision d'articuler les instruments de microchirurgie endoscopique est illustré dans la chirurgie gynécologique avec réanastomose des trompes. En 2007, Dharia et al (4) comparé de manière prospective robotique assistée par anastomose tubaire pour ouvrir anastomose tubaire microchirurgicale chez les femmes présentant des antécédents de ligature tubaire bilatérale qui désiraient inversion. Ils ont trouvé robotique anastomose tubaire a été associé avec le temps beaucoup plus de temps opératoire (201 minutes contre 155 minutes avec ouvertes), mais significativement plus courte durée de séjour (4 heures contre 34,7 heures avec ouverts) et un retour plus rapide aux activités normales de la vie quotidienne (11,1 jours, comparativement à 28,1 jours avec ouverte). Les taux de grossesse étaient comparables entre les groupes (62,5% contre 50% avec ouverts), pourtant le groupe de robotique avait un nombre plus élevé de grossesses extra-utérines (4 contre 1 avec Open). Le coût de chaque prestation a été similaire entre anastomose robotiques (92488 $) et d'ouvrir anastomose tubaire (92206 $).
Applications de la chirurgie assistée par robot en urogynécologie / Pelvic reconstruction:
Sacrocolpopexie est probablement la plus forte croissance procédure de reconstruction effectué par robotique. La procédure implique une dissection étendue de l'espace présacré et de la cloison recto-vaginale, le positionnement de maille, suture, et extra-corporels suture et nuds, ce qui est simplifiée par le système robotisé. Il ya quatre principales études sur sacrocolpopexie robotique. La force majeure de cette étude de cohorte rétrospective (17) est le fait que les auteurs du rapport sur les résultats des sacrocolpopexie robotique en comparaison avec un groupe contrôle de patients ayant subi une sacrocolpopexie abdominale, le critère standard de pointe pour prolapsus vaginal. Il est essentiel d'inclure un groupe témoin de comparaison pour évaluer l'efficacité de cette récente mini-invasive technique chirurgicale. Il est à noter que le groupe témoin dans cette étude comprenait des patients à la même institution, exposés aux mêmes modes de pratique concernant les soins périopératoires, notamment la technique chirurgicale similaires, la prophylaxie antibiotique et Directives de rejet post-opératoires que le groupe de robotique. Une autre force de cette étude est l'utilisation de données objectives, sous la forme de POP-Q scores, pour l'évaluation des résultats. Ce parti pris qui minimise mai présenté par le caractère rétrospectif de l'étude. Sacrocolpopexie Robotic démontré similaires à court terme voûte vaginale soutien, comparativement à sacrocolpopexie abdominale, avec moins de perte de sang et de plus courte durée du séjour. Le temps opératoire était plus longue, mais mai diminuer à mesure que la courbe d'apprentissage de cette nouvelle procédure s'améliore. Il y avait des résultats similaires entre les deux groupes en termes de complications périopératoires, mais elle est limitée par la faible incidence de ces complications. Des données à long terme sont nécessaires pour évaluer la durabilité de l'approche du récent mini-invasive au prolapsus de réparation. Robotic réparer les fistules vésico-vaginales et ureterovaginal a été rapporté par petites séries de cas et des rapports de cas. Dans une série de cas de sept patients souffrant de fistules vésico-vaginales, les chercheurs ont fait état d'une durée opératoire moyenne de 141 minutes (fourchette de 110 à 160). Signifie la perte de sang était de 90 mL, et aucune complication per-opératoire ou postopératoire significative n'a été observée (18).
Courbe d'apprentissage et reconnaissance des titres:
La croyance est que la chirurgie robotique permettra un développement plus rapide des compétences nécessaires et de permettre un plus grand nombre de chirurgiens d'atteindre ces compétences, et par conséquent, fournir des options chirurgicales minimalement invasives à un plus grand nombre de patients. Il ya une pénurie de chirurgiens expérimentés robotique. Actuellement, la formation consiste à la pratique avec le robot chirurgical en soit un porc ou un humain et l'environnement de tissus frais pour se familiariser avec les fonctions du robot, l'attachement du bras robotique de la trocarts robotique, et les fonctions globales de la robotique console. Perfectionnement professionnel permet aux chirurgiens d'apprendre à exécuter des manoeuvres simples comme la saisie, la coupe, et nouez intracorporel vente liée, la dernière tâche étant particulièrement difficile avec la laparoscopie conventionnelle. Deux études ont spécifiquement étudié les courbes d'apprentissage. Une étude récente (19) a évalué 113 patients séquentielle sur une période de 22 mois. Ils ont constaté que la courbe d'apprentissage pour les différentes interventions chirurgicales bénignes stabilisée en ce qui concerne les temps de la durée opératoire après 50 cas. Une courbe d'apprentissage similaire a été documentée pour l'équipe de la salle d'opération pour être en mesure de mettre en place le robot pour la chirurgie dans 30 minutes. Ce point de rupture a été de 20 cas. Un des grands obstacles souvent rencontrés au début de l'expérience de robotique d'un chirurgien est «temps d'amarrage», ou la fixation du dispositif robotique pour le patient.
Avec l'introduction de la chirurgie robotique, les hôpitaux et les ministères ont été mis au défi d'établir des exigences de délivrance de titres de cette technique chirurgicale de pointe. Il n'y a pas universellement établie accréditation des lignes directrices. La plupart des établissements de soins de santé nécessitent l'exécution d'un minimum de deux procédures chirurgicales robotisées de chaque type pour lequel les privilèges sont demandés dans la présence d'un précepteur d'experts. Certaines institutions sont l'aide de quatre comme le nombre minimal de chirurgies nécessaires pour surveillé robotique privilèges indépendant robotique. Un précepteur expert est défini comme un chirurgien qui a actuellement robotique chirurgicale privilèges et a été approuvé en tant que précepteur expert par le président du Département de la personne demandant des privilèges. Semblable à l'entretien d'autres procédures chirurgicales de compétence exige en uvre de procédures sur une base continue.
Future of Robotic Surgery:
Dans cet avenir high-tech, opération pouvait être effectuée habilement et rapidement même dans les endroits dangereux ou inaccible. En plus de petits endroits ou restrictive dans le corps humain, des endroits éloignés dans le monde sont souvent cités par ceux qui l'invoquent la promesse de la chirurgie robotique. Le prolongement logique de ce mode de fonctionnement - téléchirurgie pourrait être un bon moyen de distribuer les soins de santé dans les pays en développement. Et la NASA étudie son potentiel pour le projet de mission habitée vers la Lune et sur Mars. Bon nombre des inconvénients pourraient être améliorées avec le développement et le perfectionnement technologique. Les recherches futures est impératif d'aborder les questions de coût-efficacité, les effets sur la formation des résidents, et si cela est la meilleure technologie à la disposition de tous les chirurgiens ou à un nombre limité de chirurgiens avec un volume élevé de chirurgie robotique qui développent une expertise particulière et sont en mesure de maintenir maîtrise de cette technologie en pleine évolution.
Telestration, la capacité d'écrire sur un écran tactile et ont le marquage visible à la console, est utile mais ne remplace pas l'orientation scolaire une «co-sugeon" robotique console donnerait formation. Une telle co-pilote "console est actuellement disponible avec la plate-forme commercialy Si. Alors même que les systèmes actuels commencent à être mises en pratique, les véritables visionnaires se concentrent sur le robot chirurgical moins comme un dispositif mécanique que comme un système d'information - qui doivent se fondre avec d'autres systèmes informatiques. Un exemple proposé de ce genre de fusion est la chirurgie guidée par l'image, aussi appelée la navigation chirurgicale. Robot-assisted chirurgiens seront en mesure de voir en temps réel, des images en trois dimensions du scanner électronique en surimpression sur le champ opératoire qui est affichée sur le moniteur (20). En d'autres termes, sur l'écran, de l'anatomie de l'homme seront rendus translucides, et le chirurgien sera en mesure de déterminer l'emplacement exact d'une tumeur et plus facilement éviter d'endommager les structures vitales - telles que des gros vaisseaux intra-parenchymateuses et les conduits biliaires qui sont parfois accidentellement coupés, ou la veine vana inférieure au cours de la dissection des ganglions lymphatiques au cours des cas d'oncologie gynécologique ou lors d'une surrénalectomie droite. En fait, avec des images scanner pré-opératoire, les chirurgiens puissent pratiquer la chirurgie robotisée de leurs patients, la veille, et l'ordinateur du robot pourrait être programmée pour ne pas permettre à ses instruments de pénétrer dans la veine cave, éliminant ainsi les mésaventures sanglantes peropératoire.
Résumé:
La chirurgie robotique a connu une croissance énorme au cours des dix dernières années. Parce que la technologie robotique permet aux chirurgiens de facilement et simplement accomplir les manuvres complexes par laparoscopie, il a déjà révolutionné urologique laparoscopique et chirurgie oncologique. Plusieurs études ont fait de relier les technologies robotiques avec des performances plus rapides, une meilleure précision, plus rapide suture, et moins d'erreurs par rapport aux instrumentation laparoscopique conventionnelle. Les avantages incluent: dextérité, la précision, en imagerie tridimensionnelle et de la fatigue des chirurgiens à taux réduit. Ses limites sont: le manque de feedback tactile, augmentation des coûts, un système encombrant. Bien conçu études randomisées comparant les voies d'une chirurgie avec cliniquement significative des résultats à long terme sont nécessaires. Ces résultats comprennent effet sur la qualité de vie et de satifaction patient, liée à l'hystérectomie, la récidive et les taux de survie pour les procédures de l'oncologie, les taux de fécondité et des résultats futurs liés à la grossesse tubaire ou réanastomose myomectomie, et les taux de réintervention pour l'incontinence urinaire ou récurrentes prolapsus des organes pelviens.
Remerciements:
La reconnaissance est exprimée à M. James L. Whiteside, département d'obstétrique et de gynécologie, Dartmouth Medical School et Dartmouth-Hitchcock Medical Center, Lebanon, New Hampshire (USA) pour les avis d'experts et l'examen du papier. Un merci spécial à Kendra Martell et Jonathan Conta, Intuitive Surgical Inc, Sunnyvale, CA pour l'aide à la recherche et de soutien.
Références:
- Stylopoulos N, Rattner D. Robotics and ergonomics. Surg Clin North Am 2003;83:1321-1337
- Satava RM. Robotic surgery: from past to future -- a personal journey. Surg Clin North Am 2003;83:1491-1500,xii
- Camarillo DB, Krummel TM, Salisbury JK Jr. Robotic surgery: past, present, and future. Am J Surg 2004;188:Suppl:2S-15S
- Visco AG, Advincula AP. Robotic gynecologic surgery. Obstet Gynecol 2008;112:1369-1384
- Payne TN, Dauterive FR. A comparison of total laparoscopic hysterectomy to robotically assisted hysterectomy: surgical outcomes in a community practice. J Minim Invasive Gynecol 2008;15:286-291
- Wu JM, Wechter ME, Geller EJ et al. Hysterectomy rates in the United States, 2003 Obstet Gynecol 2007;110:1091-1095
- Meeks GR. Advanced laparoscopic gynecologic surgery. Surg Clin North Am 2000;80:1443-1464
- Robinson BL, Liao JB, Adams SF et al. Vaginal cuff dehiscence after robotic total laparoscopic hysterectomy. Obstet Gynecol 2009;114:369-371
- Diaz-Arrastia C, Jurnalov C, Gomez G et al. Laparoscopic hysterectomy using a computer-enhanced surgical robot. Surg Endosc 2002;16:1271-1273
- Olive DL, Parker WH, Cooper JM et al. The AAGL classification system for laparoscopic hysterectomy. Classification committee of the American Association of Gynecologic Laparoscopists (AAGL). J Am Assoc Gynecol Laparosc 2007;7:9-15
- Kho RM, Hilger WS, Hentz JG et al. Robotic hysterectomy: technique and initial outcomes. Am J Obstet Gynecol 2007;197:113.e1-4
- Veljovich DS, Paley PJ, Drescher CW et al. Robotic surgery in gynecologic oncology: program initiation and outcomes after the first year with comparison with laparotomy for endometrial cancer staging. Am J Obstet Gynecol 2008;198:679.e1-9
- Magrina JF, Kho RM, Weaver AL et al. Robotic radical hysterectomy: comparison with laparoscopy and laparotomy. Gynecol Oncol 2008;109:86-91
- Boggess JF. Robotic-Assisted Hysterectomy for Endometrial Cancer. National Library of Medicine Archives. http://www.nlm.nih.gov/medlineplus/surgeryvideos.html Accessed September 22, 2009
- Advincula AP, Xu x, Goudeau S et al. Robotic-assisted laparoscopic myomectomy versus abdominal myomectomy: a comparison of short-term surgical outcomes and immediate costs. J Minim Invasive Gynecol 2007;14:698-705
- Advincula AP, Song A. The role of robotic surgery in gynecology. Curr Opin Obstet Gynecol 2007;19:331-336
- Geller EJ, Siddiqui NY, Wu JM et al. Short-term outcomes of robotic sacrocolpopexy compared with abdominal Sacrocolpopexy. Obstet Gynecol 2008;112:1201-1206
- Hemal AK, Kolla SB, Wadhwa P. Robotic reconstruction for recurrent supratrigonal vesicovaginal fistulas. J Urol 2008;180:981-985
- Leihan JP Jr, Kovanda C, Seshadri-Kreaden U. What is the learning curve for robotic assisted gynecologic surgery? J Minim Invasive Gynecol 2008;15:589-594
- Ota T, Degani A, Schwartzman D et al. A highly articulated robotic surgical system for minimally invasive surgery. Am Thorac Surg 2009;87:1253-1256
Publié: 23 November 2009
Dedicated to Women's and Children's Well-being and Health Care Worldwide
www.womenshealthsection.com